マウス/タッチパッドによる操作
ゲームパッドが使えない環境では、マウスやタッチパッドを使ってGUIで速度指令値を送ることができます。
mouse_teleopのセットアップ
次のコマンドでcatkin_wsに移動します。
cd ~/catkin_ws/src
githubからmouse_teleopを含む、teleop_toolsのソースコードをクローンします。
git clone https://github.com/ros-teleop/teleop_tools.git -b kinetic-devel
ビルドしましょう。
catkin build teleop_tools
ビルドエラーが出なければ、セットアップは完了です。
mouse_teleopの実行
次のコマンドでmouse_teleopを実行しましょう。
roslaunch lightrover_ros mousectrl.launch
しばらく待つと、以下のような画面が表示されます。
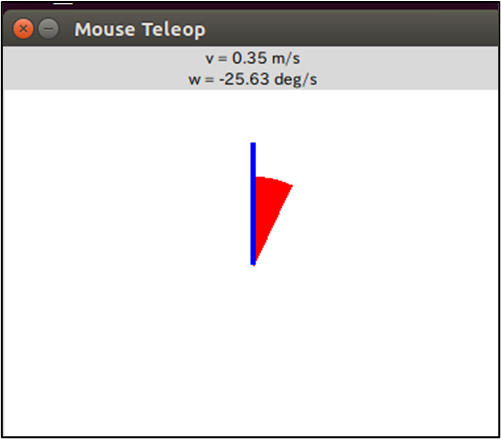
画面上をマウスでドラッグすることで、ライトローバーを走行させることができます。
なお、画面上に表示される速度、旋回速度と、ライトローバーの走行速度は一致しません。